CoderDojo BambInFestival: ultima puntata
2 Giugno 2015Siamo arrivati all’ultimo evento di BambInFestival, con un progetto veramente ambizioso:

far assemblare ai nostri ninja un robot Line Follower, basato su Arduino, utilizzando molti componenti di recupero.
Durante le nostre prove prima dell’evento il robot ha evidenziato alcune criticità, io e Sergio siamo un po’ preoccupati per la piena riuscita dell’esercizio.

Ancora una volta l’aula è strapiena di facce nuove, non sarà semplice per loro districarsi in un paio di passaggi, tutt’altro che semplici, che il codice nasconde.
Laura inizia con un breve discorso presentando ai nuovi iscritti il progetto CoderDojo, accompagnata da un nutrito gruppo di ninja-mentor e poi ci dedichiamo subito al montaggio.

I grandi occupano la solita stanza dedicata alle console, questa volta sono in sedici e si sta un pochino più stretti. Non trovano però alcun problema ad assemblare il robot. Cablano il motore di spinta con l’apposito transistor e resistenza, il servocomando per lo sterzo ed il sensore di linea con infrarosso e foto-resistenza.

Anche i piccoli se la cavano piuttosto bene, ma unire assieme le due parti non è semplice: il tubo in PVC ha un diametro interno molto vicino alla dimensione del motore, ma è facile strappare i cavi di alimentazione e serve un goccio di colla a caldo per tenere tutto saldamente assieme.

Appena prima della pausa arriviamo ad avere tutti un robot completo e pronto per la programmazione.

La merenda, come al solito, è un buon momento per scambiare quattro chiacchiere e per confrontarci con l’altra classe. Ma i più accaniti ninja non vedono l’ora di tornare alle tastiere.

Come anticipavo, il codice contiene alcuni aspetti critici: serve prima centrare lo sterzo, poi bisogna rallentare il motore senza perdere in potenza. Non possiamo abusare con i delay perchè le letture del sensore devono mantenere la massima frequenza possibile.

Accendiamo quindi il motore e lo spegniamo ogni 200 millisecondi, inseguiamo poi una sorta di “grigio” che non esiste in realtà, ma che si trova a metà strada tra il valore di bianco e nero.
Immaginando di seguire il bordo destro della linea, il nostro robot devierà verso sinistra quando si trova sul nero e verso destra quando si trova sul bianco.
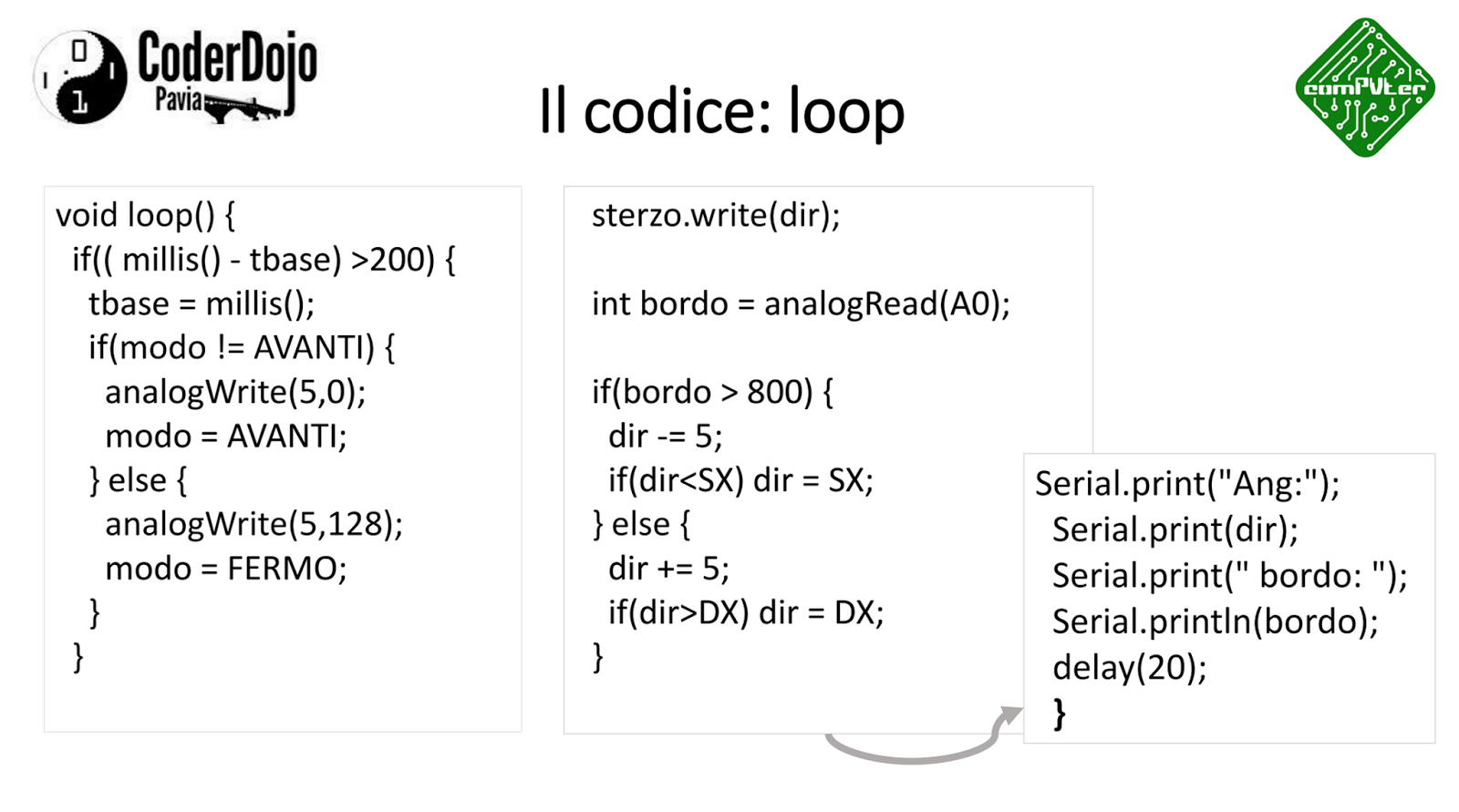
Tutto questo perchè abbiamo un solo sensore (per contenere i costi del kit).

Fortunatamente possiamo contare sull’aiuto di mentor giovani ma molto motivati e siamo riusciti a trasmettere chiaramente questi concetti ai partecipanti.

Il clima è sempre giocoso e vivace nella stanza grande dove i 26 piccoli si divertono collaborando tra loro.

I grandi seguono attenti e concentrati, tanto che si accorgono di qualche mio errore di battitura e mi correggono prontamente quando tralascio una parentesi graffa.

Arriva finalmente il tanto atteso momento in cui le nostre creazioni devono affrontare il difficile tracciato tutto a curve.

Solo pochissimi robot riescono a completare il circuito al primo colpo.

Alcuni richiedono aggiustaggi hardware…

…la maggior parte correzioni software, intervenendo sui limiti al raggio di sterzata, sulla velocità di spinta e sui valori di “grigio”.

Piano piano (quasi) tutti i robot riescono a completare il tortuoso percorso, con grande soddisfazione per tutti.
Questa serie di eventi così ravvicinati ha messo a dura prova la nostra organizzazione: preparare i kit e le tre giornate in tutti i dettagli è stata veramente dura.
Dopo ogni incontro è necessario rismontare le creazioni dei bambini, suddividere con attenzione tutte le componenti e testare ogni cosa per la settimana successiva.
Anche il semplice pulire la sede richiede tempo e non poca energia.
Senza l’aiuto dei numerosi soci della nostra associazione che ci hanno appoggiato in diverse serate, tutto questo non sarebbe stato neanche lontanamente immaginabile.
Un enorme grazie alle tante persone che hanno risposto alla nostre richieste !






